
RoboBoat or International RoboBoat Competition (IRC) is a competition that invites participants to tackle simplified versions of challenges facing the modern maritime industry and roboBoat is an international student competition teams from around the world design autonomous, robotic boats (or ASVs) to navigate through a challenge course.
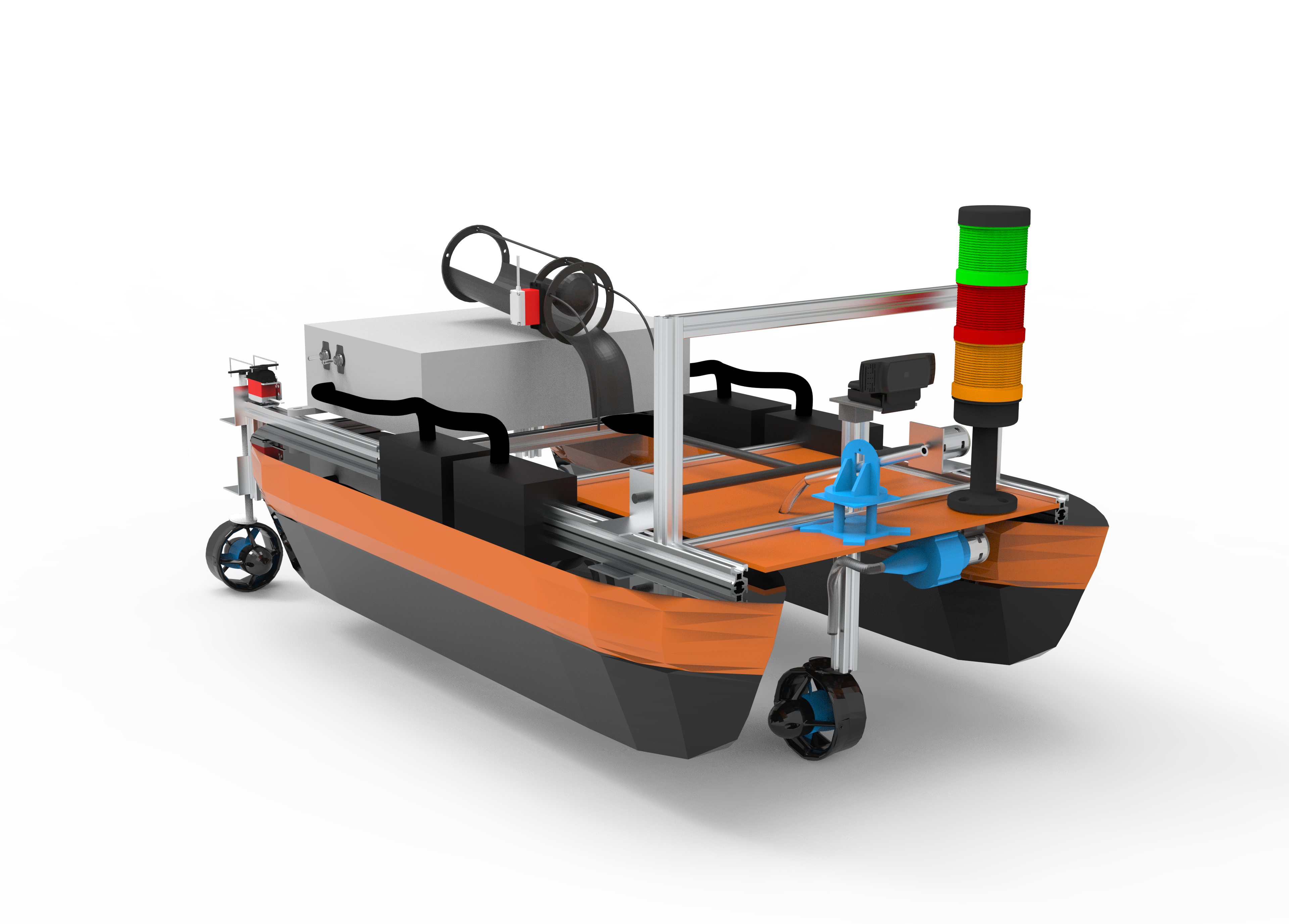
MRT PURVI EVO Is the second ship of Barelang Marine Roboti Team that made for International Roboboat Competition, MRT Purvi Evo Is an autonomous ship made by Batam State Polytechnic Students,which uses a modular/knockdown system to facilitate the process of sending ships
and this ship also uses two azimuth propellers to make it easy to manuever the ship, this ship is wider so as to facilitate the installation of electrical components.

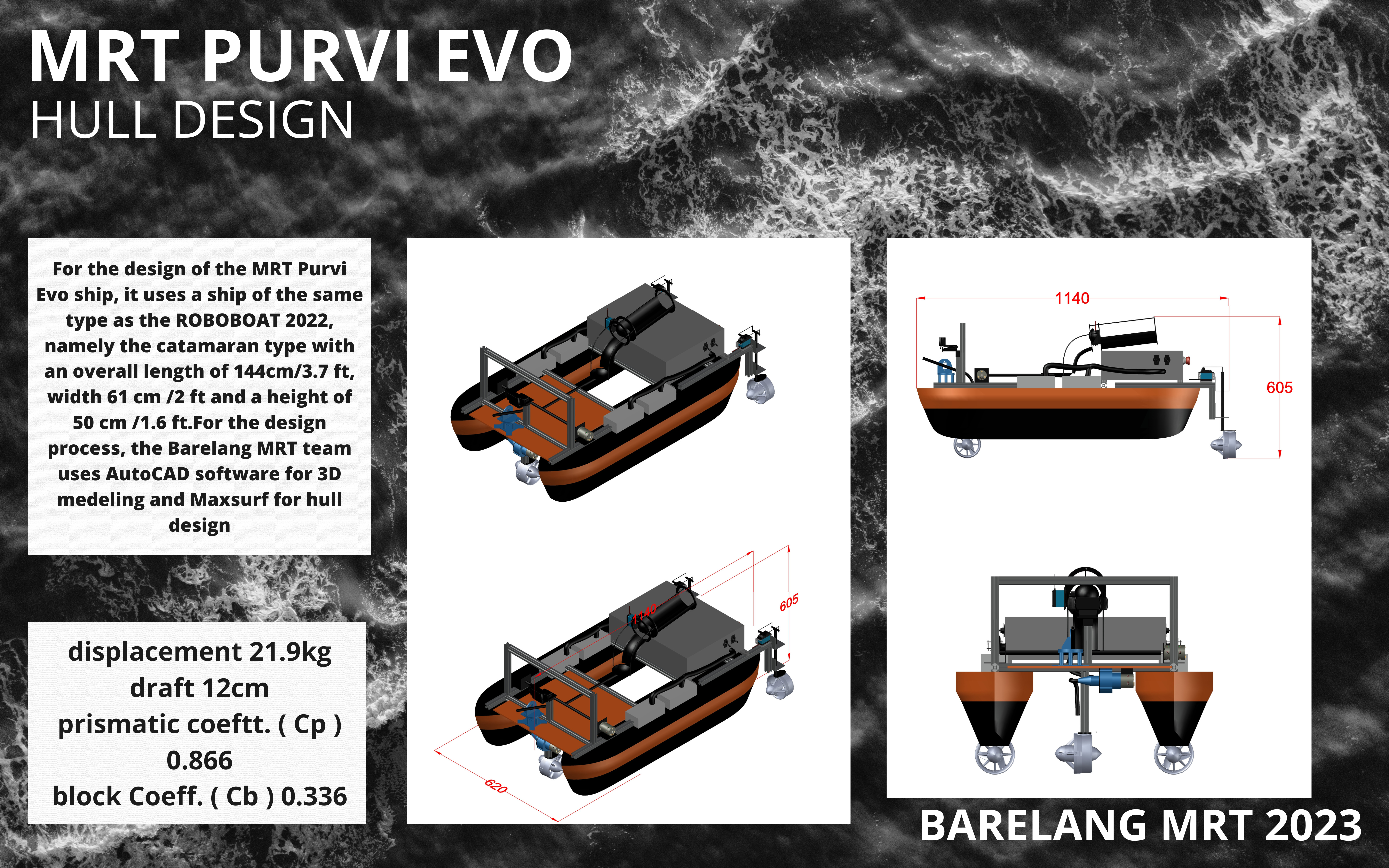
Barelang MRT's goal of choosing a catamaran-type hull is to get a smaller resistance result and a larger cargo space area, bearing in mind the tasks performed by ships require large space. The difference between the Purvi MRT and Purvi Evo MRT is that the Purvi Evo MRT uses a modular system to unite the two hulls and makes it easier to assemble the ship's system.
for the fabrication process of the MRT PURVI EVO using balsa wood for the ship model then coated with fiberglass to prevent leaks and to make it stronger. The difference between the Purvi MRT and Purvi Evo MRT is that the Purvi Evo MRT uses a modular system to unite the two hulls and makes it easier to assemble the ship's system.


The electrical system diagram uses the Arduino Mega(5V) microcontroller as the brain that runs and controls all systems used on the ship, Logitech C290(5V) Camera sensors, IMU bno005(5V), GPS Neo-6 to set the position and direction towards the ship as well as uniting the ship while moving, 2 BTS 7960(12-24V) drivers are used to drive the DC motors on Ball and Water Shooters, 3 ESC(electronic speed controller(16.8V)) are used as booster controllers used on ships, FTDI(5V) used for communication between Mini PC and Arduino
Receiver(5V) is used to control the Remote which is used to control the ship manually and autonomously, Servo TD8120MG(5v) is used as an azimuth drive on the thruster, RGB indicator Lamp(12V) is used to determine the state of the ship in manual and autonomous positions, push buttons are used to activate and deactivate the power supply in the ship's electrical system, Mini PC(19V) is used as a p control system exist at the time autonomous and process ship data in real-time, as well as provide efficient control of the navigation system.
Navigating the Panama Canal is a mission that must be carried out in order to be able to proceed to the Magellan's Route stage. To pass this mission, the ship uses a webcam sensor which functions to identify the location of obstacles on the track then the data will be received by the Mini PC and processed as input for ship motion.

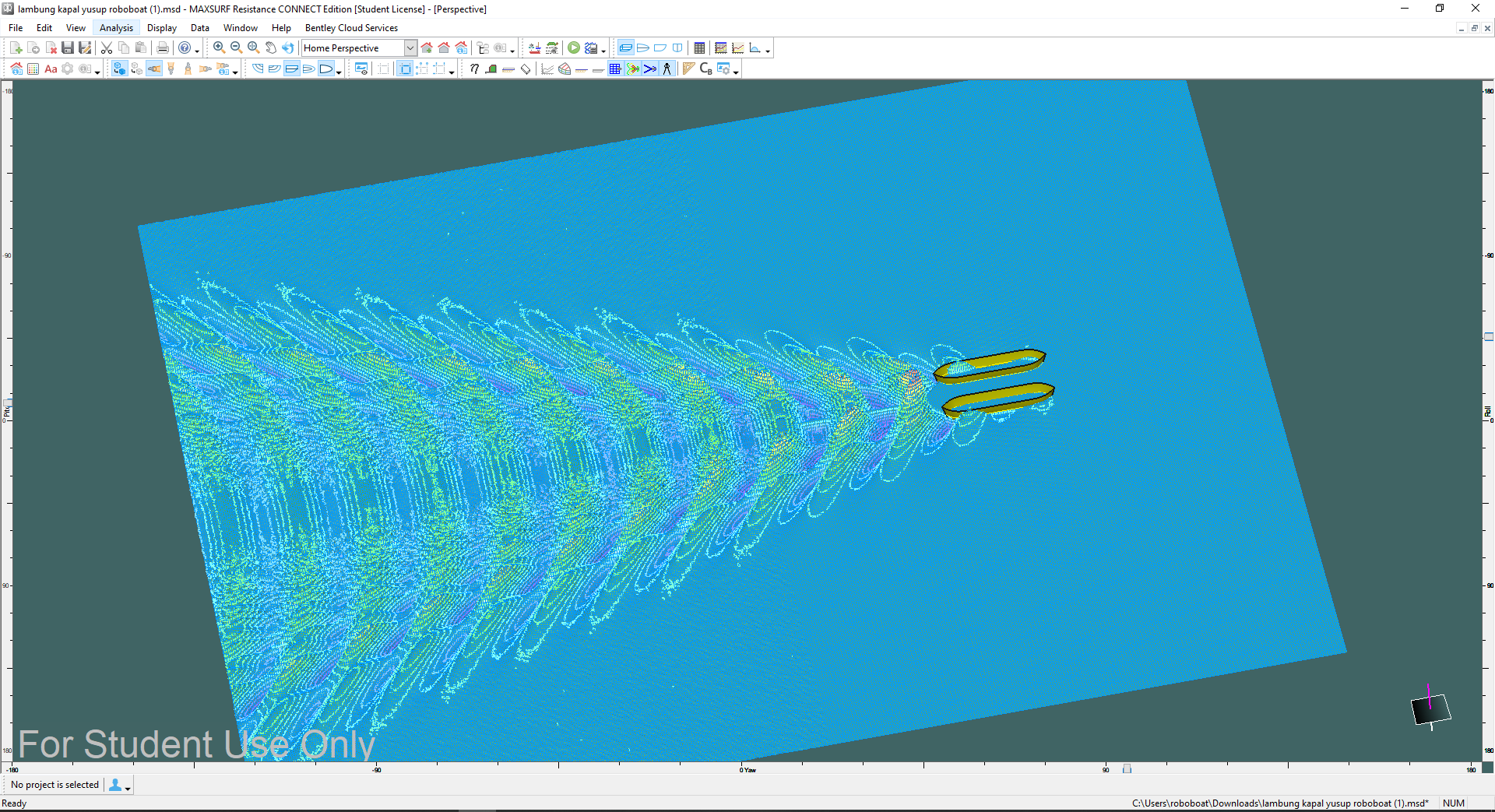
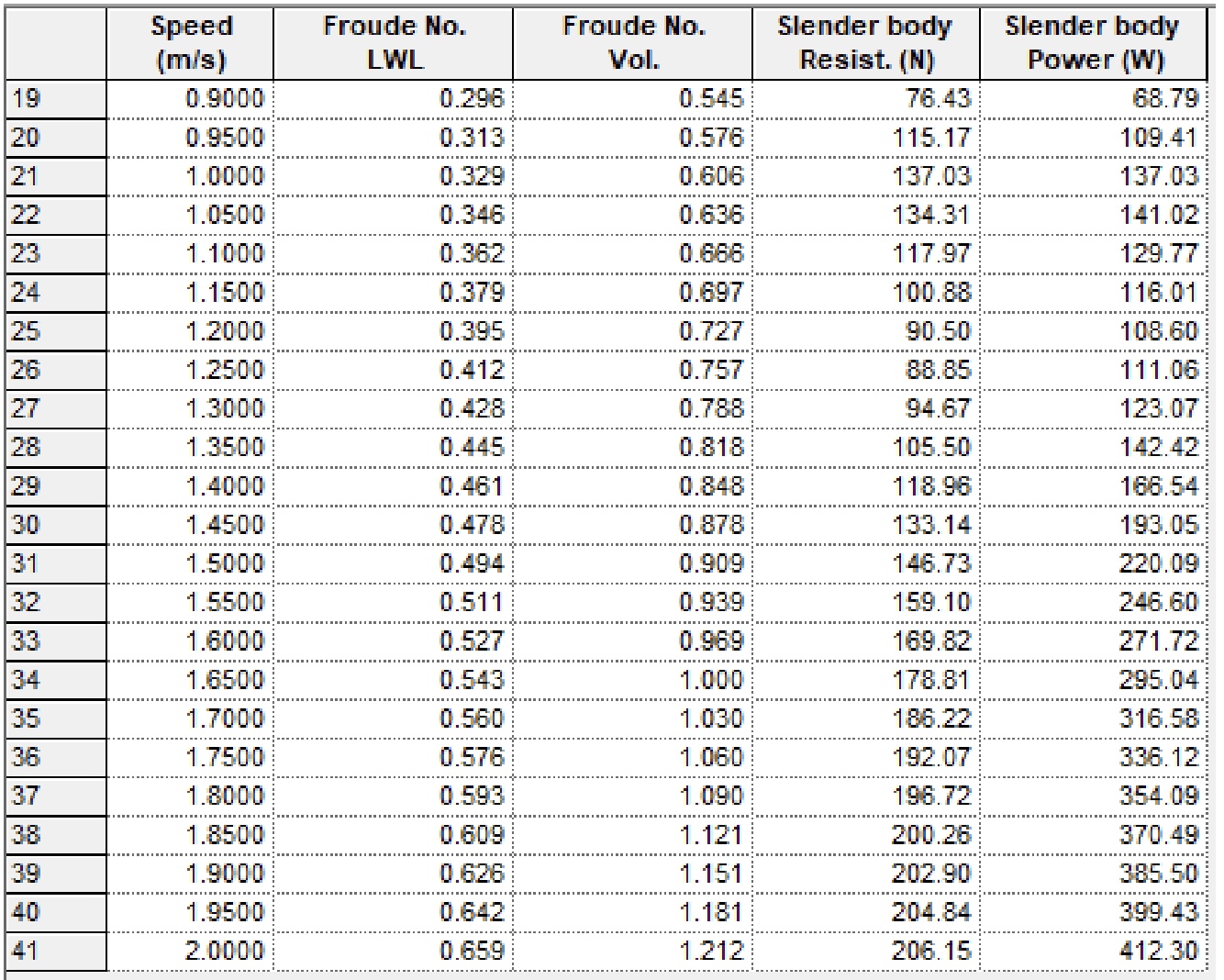
Hull test was performed by combining software simulation. The team used Maxsurf and ANSYS software to perform Resistance, Stability and Seakeeping analysis. The Tests are performed to analyze things that may affect the components on the ship. Then we compared the data results of MRT-Purvi Evo (2023)
Based on the data above, it can be concluded that the MRT Purvi Evo requires a power of 412 W to reach a speed of 2m/s or 137 W to reach a speed of 1m/s. To meet the power requirements of the Purvi Evo MRT, the Barelang MRT team chose the T200 thruster from blue robotic, the team chose the T 200 thruster.
The following data is compared with the power generated by the T200 thruster, it can be concluded that one thruster is capable of producing 281 W using a 14v battery, so the Purvi Evo MRT can be designed using two thrusters to meet the results of these obstacles and one thruster as a bow thruster. For the test results directly on the lake, for the motion test on the straight track of the Purvi Evo MRT ship at 50% and 100% speed, the following data is obtained
.gif)
To do a test on camera detection, you do it by doing 8 tests on camera detection, then measuring the distance for each test, you get graphic data as below. The graphic data obtained results in the form of a camera on the MRT Purvi Evo ship that can detect objects as far as 2.5 m, and from these results the Barelang MRT team concluded that the object detection camera on our ship can work well in the field.
For testing the GPS sensor on the MRT Purvi Evo ship, it is carried out by simulating the roboboat arena into monitoring the ship's location will be read automatically and the data obtained will be in the form of x and y coordinates.
To test the IMU sensor, the team did it by means of the MRT Purvi Evo ship, which was left in the water for 5 minutes, then the team monitored the roll and pitch of the ship, the data will be obtained as below
For the science test that the team does by means of 5 ship positions at angles of 0°,90°,180°,270°,360° then the science data will be obtained as follows. Based on bno005 immune testing carried out on the ship in 4 directions facing the ship at positions 0, 90, 180, 270. In this experiment the direction of the ship has an error tolerance at the point of facing 5 degrees down and 5 degrees up depending on the wave or wind direction can change the direction of the ship's course. so the team sees with this little tolerance data the team concludes that sensor science can be used in the Roboboat 2023 Competition
